图的定义及应用
# 图的定义
图是由顶点集 V 和顶点间的关系集合 E(边的集合)组成的一种数据结构,可以用二元组定义为:G=(V,E)
# 基本术语
- 有向图和无向图
在图中,若用剪头标明了边是有方向性的,称这样的图为有向图,否则称无向图 - 完全图、稠密图、稀疏图
具有 n 个顶点,n(n-1)/2 条边的图,称为完全无向图
具有 n 个顶点,n(n-1)条弧的有向图,称为完全有向图。
完全无向图和完全有向图都称为完全图。
对于一般无向图,顶点数为 n,边数为 e,则 0<=e<=n(n-1)/2
对于一般有向图,项点数为 n,弧数为 e,则 0<=e<=n(n-1)
当一个图接近完全图时,则称它为稠密图,相反,当一个图含有较少的边或者弧则称为稀疏图 - 度、入度、出度
在图中,一个顶点依附的边或弧的数目,称为该顶点的度。
在有向图中,一个顶点依附的弧头数目,称为顶点的入度,一个顶点依附的弧尾数目,称为该顶点的出度,某个顶点的入度和出度这和称为该顶点的度。
# 图的存储
图的存储结构可以分为5种:
- 邻接矩阵
图的邻接矩阵存储方式是用两个数组来表示图:
一个一维数组存储图中顶点信息;(顶点数组)
一个二维数组(称为邻接矩阵)存储图中边或弧的信息(边数组) - 邻接表
邻接矩阵是一种不错的图存储结构。 但是:对于边树相对顶点较少的图,这种结构是存在存储空间的极大浪费的。
因此我们考虑先进一步,使用邻接表存储. - 十字链表 对于有向图而言,邻接表也是有缺陷的。 试想想哈,关心了出度问题,想了解入度问题就必须把整个图遍历才能知道。 反之,逆邻接表解决了入度问题却不了解出度的情况。 那是否可以将邻接表和逆邻接表结合起来呢?答案是肯定的。 这就是所谓的存储结构:十字链表。
- 邻接多重表
有向图的优化存储结构为十字链表。
对于无向图的邻接表,有没有问题呢?如果我们要删除无向图中的某一条边时?
那也就意味着必须找到这条边的两个边节点并进行操作。其实还是比较麻烦的。于是出现的邻接多重表 - 边集数组
边集数组侧重于对边依次进行处理的操作,而不适合对顶点相关的操作。
边数集由两个一维数组组成,一个存储顶点信息,一个存储边的信息,包括起点下标(start),终点下标(end)和权值(weight)
# 图的遍历
两条遍历图的算法:
- 深度优先遍历(Depth_First_Search),也称为深度优先搜索,简称DFS
- 广度优先遍历(Breadth_First_Search),又称为广度优先搜索,简称BFS。
深度遍历类似树的前序遍历,广度优先遍历类似于树的层序遍历。
# 深度优先搜索
深度优先搜索采用的思想🔖:类似于树的先序遍历(根左右)
- 首先访问顶点 i,并将其访问标记置为访问过,即
visited[i]=1; - 然后搜索与顶点 i 有边相连的下一个顶点 j,若 j 未被访问过则访问它,并将 j 的访问标记置为已访问过,visited[j]=1,然后从 j 开始重复此过程,若 j 已访问,再看与 i 有边连的其它顶点;
- 若与 i 有边相连的顶点都被访问过,则退回到前一个访问顶点并重复刚才过程,直到图中所有顶点都被访问过为止。
# 广度优先搜索
广度优先搜索采用的思想🔖:队列
- 开始时要将其置空
- 在每访问一个顶点时,要将其入队
- 在访问一个顶点的所有后继时,要将其出队。
- 若队列为空时,说明每个访问过的顶点的所有后继均已访问完毕,因而本次遍历可以结束。若此时还有未访问的顶点,需要另选起点进行遍历。
# 图的应用(四大应用)
# 关于图的几个概念定义:
- 连通图:在无向图中,若任意两个顶点 i 到顶点 j 有路径相连(当然从 j 到 i 也一定有路径)。则称该无向图为连通图。
- 强连通图:在有向图中,若任意两个顶点 i 到 j 有路径相连,则称该有向图为强连通图。
- 连通网:在连通图中,若图的边具有一定的意义,每一条边都对应着一个数,称为权;权代表着连接连个顶点的代价,称这种连通图叫做连通网。
- 生成树:一个连通图的生成树是指一个连通子图,它含有图中全部 n 个顶点,但只有足以构成一棵树的 n-1 条边。一颗有 n 个顶点的生成树有且仅有 n-1 条边,如果生成树中再添加一条边,则必定成环。
- 最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
# 👉应用1️⃣:生成树
在图论中,常常将树定义为一个无回路的连通图
两种遍历的算法可以获得生成树:
深度优先(搜索)生成树、广度优先(搜索)生成树
在一般情况下,图中的每条边若给定了权,这时,我们所关心的不是生成树,而是生成树中边上权值之和。若生成树中每条边上权值之和达到最小,称为最小生成树。
# 👉应用2️⃣:最小生成树
# 最小生成树的两种方法
避圈法:
第一种最小生成树:普里姆算法(prim)
第二种最小生成树:克鲁斯卡尔算法(kruskal)
破圈法:运筹学最小生成树破圈法
避圈法是:你一直找最短的边然后保留下来,前提是不会形成回路
破圈法是:看见回路就找那个回路最长的边然后消除掉,然后再找下一个回路最长的边消除。算法结束:当剩下的边=结点数-1 的时候。
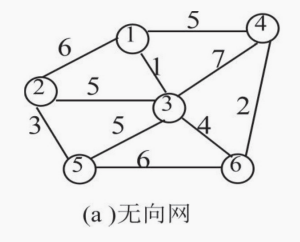
# 1️⃣最小生成树算法:普里姆算法(prim)
普里姆算法思想:在图中任取一个顶点 K 作为开始点,令 U={k},W=V-U,其中 V 为所有顶点集,然后找一个顶点在 U 中,另一个顶点在 W 中的边中最短的一条,找到后,将该边作为最小生成树的树边保存起来,并将该边顶点全部加入 U 集合中,并从 W 中删去这些顶点,然后重新调整 U 中顶点到 W 中顶点的距离,使之保持最小,再重复此过程直到 W 为空集为止。
算法思想过程:
设置2个数据结构:
lowcost[i]:表示以i为终点的边的最小权值,当lowcost[i]=0,说明以i为终点的边的最小权值=0,也就是表示i点加入了MST
visitInfo: 表示已经访问的节点
- 我们假设1是起始点,进行初始化(
∞代表无限大,即无通路): // 数组下标加1是节点数字
1 => 3lowcost[1]=6 lowcost[2]=1 lowcost[3]=5 lowcost[4]=Infinity lowcost[5]=Infinity
3 => 6lowcost[1]=5 lowcost[3]=5 lowcost[4]=6 lowcost[5]=4
6 => 4lowcost[1]=5 lowcost[3]=2 lowcost[4]=6
4 => 2lowcost[1]=5 lowcost[4]=62 => 5lowcost[4]=3
上面的图用表格表示如下:
其中(∞代表没有关系)
| 1 | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|
| 1 | ∞ | 6 | 1 | 5 | ∞ | ∞ |
| 2 | 6 | ∞ | 5 | ∞ | 3 | ∞ |
| 3 | 1 | 5 | ∞ | 7 | 5 | 4 |
| 4 | 5 | ∞ | 7 | ∞ | ∞ | 2 |
| 5 | ∞ | 3 | 5 | ∞ | ∞ | 6 |
| 6 | ∞ | ∞ | 4 | 2 | 6 | ∞ |
例: V={1,2,3,4,5,6} 则 U={} W={1,2,3,4,5,6}
实现prim算法过程:
| u | w |
|---|---|
| {1} | {2,3,4,5,6} |
| {1,3} | {2,4,5,6} |
| {1,3,6} | {2,4,5} |
| {1,3,6,4} | {2,5} |
| {1,3,6,4,2} | {5} |
| {1,3,6,4,2,5} | {} |
# 2️⃣最小生成树算法:克鲁斯卡尔算法(kruskal)
克鲁期卡尔算法的基本思想是:将图中所有边按权值递增顺序排列,依次选定取权值最小的边,但要求后面选 取的边不能与前面选取的边构成回路,若构成回路,则放弃该条边,再去选后面权值较大的边,n 个顶点的图中,选够 n-1 条边即可。
时间复杂度:
克鲁斯卡尔算法的时间复杂度主要由排序方法决定,而克鲁斯卡尔算法的排序方法只与网中边的条数有关,而与网中顶点的个数无关,当使用时间复杂度为O(elog2e)的排序方法时,克鲁斯卡尔算法的时间复杂度即为O(log2e),因此当网的顶点个数较多、而边的条数较少时,使用克鲁斯卡尔算法构造最小生成树效果较好 。
算法步骤:
a、对图的存储结构,按照权值,从小到大排序。
b、对并查集进行初始化,即把每一个位置中的值初始化为其对应下标。(上图是已经初始化好的)
c、选取存储结构的第一项(最小项),查询该边所对应的顶点在并查集中是否同源,同源则进行e,不同源则进行d
d、若不同源,则把该边加入生成树,并计算和;修改前者的根在并查集中位置的值为后者的根。如下图:第一项(0,1)不同源,顶点0的根为0,顶点1的根为1,设a为并查集数组,把a[0] = 1,即把并查集中下标为0的位置中的值修改为1。这样,(0,1)这条路径就加入了最小生成树。
【注】:并查集-图的连通性 (opens new window)
克鲁斯卡尔最小生成树过程
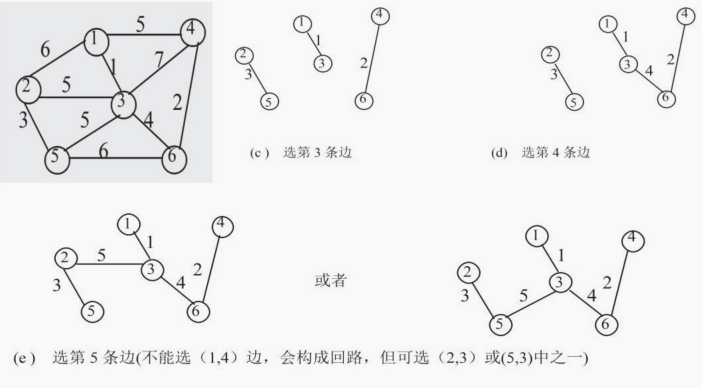
避圈法:
我们熟知的 Prim 算法和 Kruskal 算法可以用来找到最小生成树,不过这两种算法的思想其实是一致的:一开始我只有有限的信息,无论是所有顶点做加边法,还是所有的边做加点法,一开始的信息都是不完整的。其实无论是加点还是加边,本质上是从最小的权的边开始,添加的是在未选中的边中的最小权值边,原理都是使用了 MST 性质去做的。
在做 Prim 算法和 Kruskal 算法时我们比较关心每添加了一次边就检查看看有没有出线回路,因为生成树是不能有回路。那也就是说我要避免回路的出现,在重复添加最小权值边时就能保证将最小生成树添加出来,这种手法就被称为避圈法。
破圈法:
现在我有全套的信息,我要怎么把最小生成树找出来?由于最小生成树是 n 个顶点 n - 1 条边,因此我需要将边的数量减少到 n - 1 条,一旦我满足了这点就可以认为是找到了最小生成树。
算法思想:
- 找到权值最大的边,判断这条边是否存在回路,存在则删除,如果对存在回路没有影响,则保留
- 从权值大到权值小依次判断,边的数据缩短到n-1,则构造完成
# 👉应用3️⃣:最短路径
讨论最短路径的方法有两种:单源点最短路径、所有顶点对的最短路径。
# 单源点最短路径:迪杰斯特拉(Dijkstra)算法
定义:单源点最短路径是指:给定一个出发点(单源点)和一个有向网 G=(V,E),求出源点到其它各顶点之间的最短路径。
问题:怎样求出单源点的最短路径呢?
解答:将源点到终点的所有路径都列出来,然后在里面选最短的一条即可。但是这样做用手工方式可以,当路径特别多,显的特别麻烦,并且没有什么规律,不能用计算机算法实现。
方法: 迪杰斯特拉(Dijkstra)在做了大量观察后,首先提出了按路长度递增序产生各顶点的最短路径算法,我们称之为迪杰斯特拉算法
算法思想:设 V 为网中所有顶点集合,设置并逐步扩充一个集合 S,存放已求出其最短路径的顶点,则尚未确定最短路径的顶点集合 V-S:按路径长度递增的顺序逐个把 V-S 中的顶点加到 S 中,直到 S 中包含全部顶点,而 V-S 为空。通俗的讲就是每次在全部中选最小值放进去,再对比再找最小值。
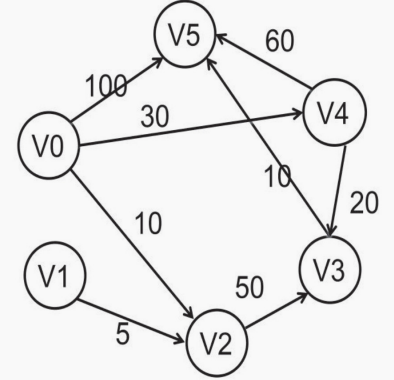
| 终点 | 从V0到各终点的最短路径 | ||||
|---|---|---|---|---|---|
| i=1 | i=2 | i=3 | i=4 | i=5 | |
| V1 | ∞ | ∞ | ∞ | ∞ | ∞ |
| V2 | 10(V0,V2) | ||||
| V3 | ∞ | 60(V0,V2,V3) | 50(V0,V4,V3) | ||
| V4 | 30(V0,V4) | 30(V0,V4) | |||
| V5 | 100(V0,V5) | 100(V0,V5) | 90(V0,V4,V5) | 60(V0,V4,V3,V5) | |
| VK | V2 | V4 | V3 | V5 | 无 |
| Path | V0-V2 | V0-V4 | V0-V4-V3 | V0-V4-V3-V5 | |
| S | {V0,V2} | {V0,V2,V4} | {V0,V2,V4,V3} | {V0,V2,V4,V3,V5} | |
这个算法的过程有比prim算法的过程稍微多一点点步骤,但是思想确实巧妙的,也是贪心原理,它的目的是求某个源点到目的点的最短距离,总的来说,dijkstra算法也就是求某个源点到目的点的最短路,求解的过程也就是求源点到整个图的最短距离,次短距离,第三短距离等等(这些距离都是源点到某个点的最短距离)。求的是原点到所有点的最短距离,最后给出目的点就能直接通过查表获得最短距离。
# 所有顶点对之间的最短路径:Floyd 算法
所有顶点对之间的最短路径是指:对于给定的有向网 G=(V,E),要对 G 中任意对顶点有序对 V、W(V<>W),找出 V 到 W 的最短距离和 W 到 V 的最短距离。
解决此问题有效的方法:轮流以每一个顶点为源点,重复执行迪杰斯特拉算法 n 次,可求得每一对顶点之间的最短路径,总的时间复杂度为 O(n^3),效率太低,于是出现了 Floyd 算法。
Floyd 算法思想:
将 V1 到 Vj 的最短路径长度初始化,即 D[i][j]为项点 i 到 j 的路径长度,然后进行 n 次比较和更新。通过一个图的权值矩阵求出它的每两点间的最短路径矩阵。
Floyd-warshall算法描述:
// floydWarshell
let n = 4;
let arcs = [
[0, 3, Infinity, 7],
[8, 0, 2, Infinity],
[5, Infinity, 0, 1],
[2, Infinity, Infinity, 0]
]
function floydWarshell() {
for (let k = 0; k < n; k++) {
for (let i = 0; i < n; i++) {
for (let j = 0; j < n; j++) {
arcs[i][j] = min(arcs[i][j], arcs[i][k] + arcs[k][j])
}
}
}
}
function min(num1, num2) {
return num1 < num2 ? num1 : num2;
}
floydWarshell();
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
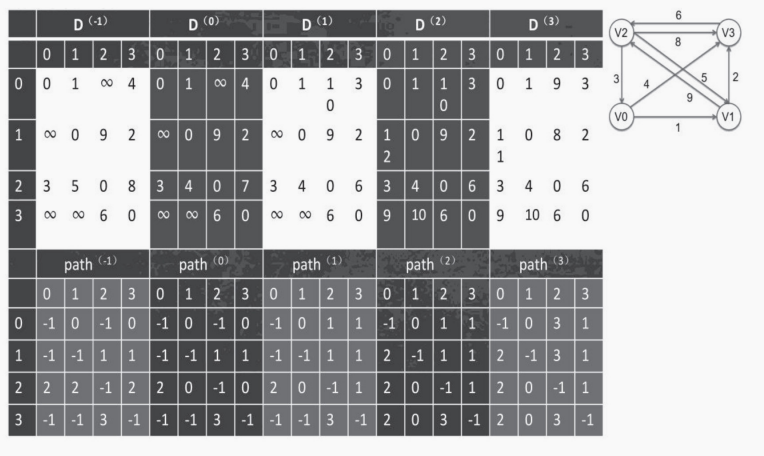
floyd 在滑块法中就是等于 0 的时候 那一行一列不动。看其它的最小的是哪个然后更新。上面的矩阵更新了,下面的矩阵也要跟着更新。从 0 到 3 依次更新,每次更新时候加入一个顶点。然后看看整个矩阵有没有新的最短路径生成。有的话就更新没有的话就不更新。
# 👉应用4️⃣:拓扑排序
通常我们把计划、施工过程、生产流程等都当成一个工程,一个大工程常常被划分成许多较小的子工程,这些子工程称为活动,这些活动完成时,整个工程也就完成了。
# AOV 网介绍
在这种有向图中,顶点表示活动,有向边表示活动的优先关系,这有向图叫做顶点表示活动的网络(Actrie On Vertices)简称 AOV 网。
在 AOV 网中,<i,j>有向边表示 i 活动应先于 j 活动开始,即 i 活动必须完成后,j 活动才可以列始,并称 i 为 j 的直接前驱,j 为 i 的直接后继。这种前驱与后继的关系有传递性,此外,任何活动 i 不能以它自己作为自己的前驱或者后继,这叫做反自反性。从前驱和后继的传递性和反自反性来看,AOV 网中不能出现有向回路(或称有向环),对工程而言,将无法进行:对程序流程而言,将出现死循环。
拓扑排序的步骤:
- 在 AOV 网中选一个入度为 0 的顶点且输出
- 在 AOV 网中删除此顶点及该顶点发出来的所有有向边
- 重复 1,2 两步,直到 AOV 网中所有顶点都被输出或网中不存在入度为 0 的顶点。
# 👉应用5️⃣:关键路径
若以带权有向图的顶点代表事件(event)或工程进展状态,用弧表示活动,弧上的权值表示完成该活动所需要的时间,则这样的带权有向图称为 AOE 网(Activity On Edge Network)
(1)只有在某顶点所代表的事件发生后,从该顶点出发的各有向边所代表的活动才能开始。
(2)只有在进入某点的各有向边所代表的活动都已结束,该顶点所代表的时事件才能发生。
关键路径(临界路径):在 AOE 网络中从源点到汇点(结束顶点)的最长路径。关键路径上的活动为关键活动。
# 总结
1:Prim是计算最小生成树的算法,比如为N个村庄修路,怎么修花销最少。
Dijkstra是计算最短路径的算法,比如从a村庄走到其他任意村庄的距离。
2:Prim算法的更新操作更新的·距离·是已访问集合到未访问集合中各点的距离;
Dijkstra算法的更新操作更新的·距离·是源点到未访问集合中各点的距离;
- Prim在稠密图中比Kruskal优,在稀疏图中比Kruskal劣。
图的存储和遍历 (opens new window) 最短路径问题 (opens new window) floyd-warshell (opens new window)